





Do You Need Help? Here Us : 电话 : +86 595 22486398
Do You Need Help? Here Us : 电话 : +86 595 22486398
震惊!新款电动挖掘机增加两项新功能
August 30, 2024
挖掘机是采矿和建筑行业最重要的机器之一。如今,化石燃料提供了挖掘机所需的大部分能源。由于这种形式的能源对环境有害,因此电动挖掘机功能的开发就显得尤为重要。尤其是液压挖掘机,即使在不移动时也会消耗大量能量。此外,液压挖掘机系统中的软管和阀门会浪费能源,促使研究人员应用电动线性执行器。这些执行器通常由电动机和一系列滚珠丝杠(或丝杠)驱动,需要承受较大的轴向应力,同时在不运动时耗散能量。
广泛的研究探索了电动执行器在挖掘机中的使用。在矿用挖掘机电驱动和控制系统的设计和实现中,提出了一种采用直流电机和晶体管功率传感器的新型矿用挖掘机机电一体化系统,旨在降低功耗20%~30%。此外,为了减少挖掘机执行器上的动态负载,研究人员旨在通过在挖掘机运动方案中加入额外的弹性阻尼装置来减少挖掘机电动执行器上的负载。
电动执行器的低反向驱动能力促使我们开发具有此功能的电动挖掘机。然而,电动致动器通常产生比液压致动器更小的力。因此,使用这些执行器的挖掘机应该进行不同的设计,以便在铲斗尖端具有相同的外部负载的情况下,执行器可以承受更轻的负载。这种设计可以提高电动挖掘机的负载能力。同时,减少执行器的负载可以降低其能耗。
1、电动挖掘机设计与制造
本研究提出了一种利用线性螺杆致动器的电动挖掘机的新颖设计,利用其较低的反向驱动能力在闲置期间节省能源,并且具有比液压致动器更低的负载能力。具体来说,新设计中线性执行器的并行排列旨在减少它们之间的负载分布(图 1)。

图 1. 装配式挖掘机和测试台
安装在挖掘机上的前三个执行器是用于动臂、动臂和铲斗运动的电动线性执行器(图 2),而第四个执行器是用于控制摆动运动的齿轮旋转直流电机。电动线性执行器中的旋转直流电机通过一系列滑轮和皮带连接到丝杠。电机还连接到旋转电位计,该电位计提供执行器长度的反馈。此外,该挖掘机中的线性执行器连接到电网作为电源。
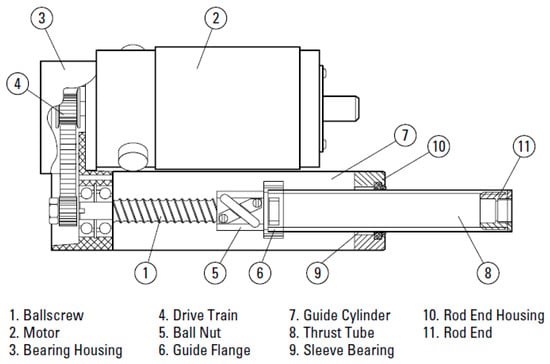
图 2. 线性电动执行器的组件
所选线性执行器的动态负载能力为2000 N,移动速度为20 mm/s。借助两个巨大的拉力弹簧,可以将吊臂连杆升起(图3)。这些弹簧的最大力为 70 kgf。挖掘机’其结构由激光切割的二维铝板和不锈钢制成。挖掘机’吊杆和吊杆由铝制成,并使用 M12 螺栓组装。
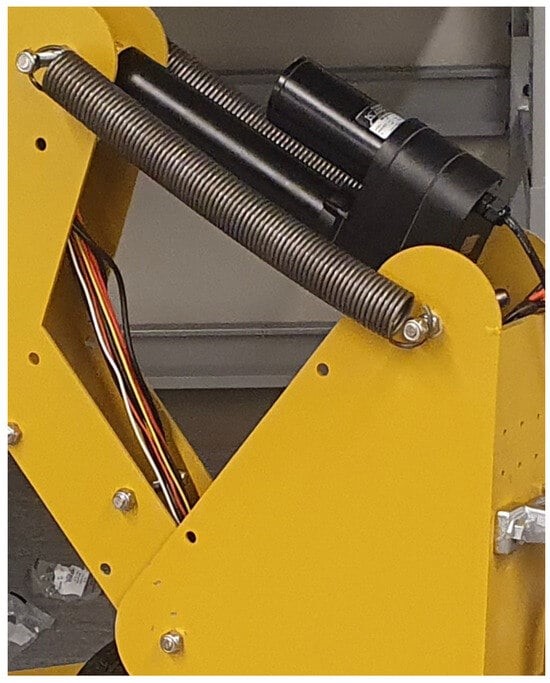
图3.两个巨大的弹簧帮助吊臂执行器抬起机器人手
四根切割好的钢管与下面的钢板焊接在一起,构成挖掘机的底架(图4)。该结构有四个不活动的轮子以方便其移动。然后使用两个坚固的轴承将挖掘机的操纵器(图 5)安装到底部框架上。

图4.挖掘机下部结构
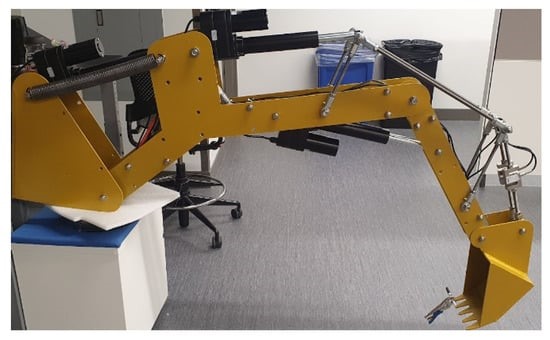
图5.挖掘机机械手部分
对于室内测试,挖掘机放置在 85 厘米的高度,然后驱动挖掘机从主容器中取出一堆沙子并将其转移到侧容器中。主容器具有透明的丙烯酸面板,可以在每次挖掘时比较实际路径和挖掘的土壤表面。深度相机安装在距主容器透明侧一定距离处并连接到 PC,用于监控容器中的沙子轮廓。使用 MATLAB R2021a 软件对来自相机的传感器数据进行后处理。后处理的第一步是捕获和裁剪数据,然后使用 MATLAB 中的边缘检测库来检测容器中沙子的轮廓(被视为地面形状)。在最后一步中,选择高度最低的边缘作为地面边缘。使用这种方法可以检测沙子的表面形状,如图6所示。有时,当沙子粘附在透明亚克力板上时,需要手工修剪边缘。
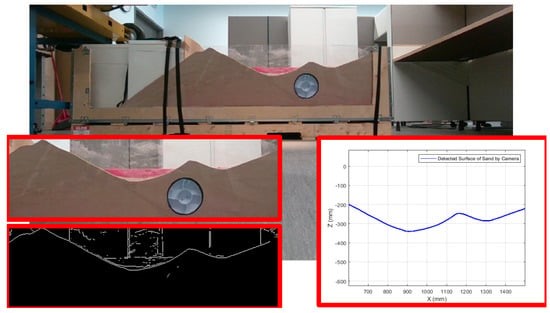
图 6. 使用 RGB 相机和 MATLAB R2021a 软件检测地面形状
2. 路径生成和跟踪控制方法
2.1.路径生成
除了使用并行执行器通过减少执行器负载来节省更多能源外,本研究还考虑了最佳路径生成以减少自主挖掘机的能耗。为此,挖掘机铲斗被认为是一种移动机器人,可以二维移动并绕单轴旋转。这三个 DOF(自由度)由动臂、斗杆和铲斗线性执行器控制。
障碍物可以由用户预先确定或使用任何实时检测方法来检测。有多种方法可用于检测地下物体的存在和位置。其中,探地雷达(GPR)和电阻率层析成像(ERT)已获得广泛接受。然而,这些技术的实施和操作成本高昂且耗时。另一项研究利用固定在挖掘机铲斗上的经济高效的磁传感器来根据磁场检测和定位金属管道和带电电线。就像移动机器人一样,挖掘机铲斗沿着指定路径移动,同时避开障碍物。但为了创造适当的途径来减少能源消耗,节能被纳入了进一步的要素。
2.2 基于PSO的路径生成
粒子群优化(PSO)是一种受鸟类和鱼类等动物集体行为启发的计算技术。它通过迭代调整搜索空间中粒子的位置和速度来解决优化问题。 PSO 旨在通过平衡探索和利用来找到最优解决方案。
本研究利用 PSO 算法生成最佳路径,旨在最大限度地减少挖掘过程中的能耗,同时避开地下障碍物。主要目标是降低能耗、减少开挖地面形状与所需轮廓的偏差以及增加与地下物体的距离。
MATLAB仿真结果表明,基于PSO的节能优化流程(图7)与未节能的相同流程相比(图8)可降低能耗18.5%,同时尽量避开地下障碍物,实现更接近的路径所需的地面形状。
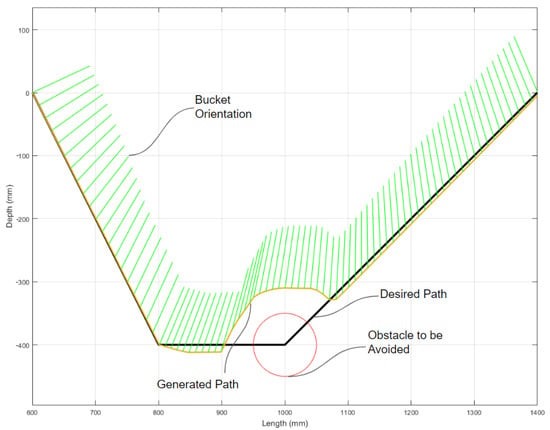
图7.考虑节能的路径生成仿真
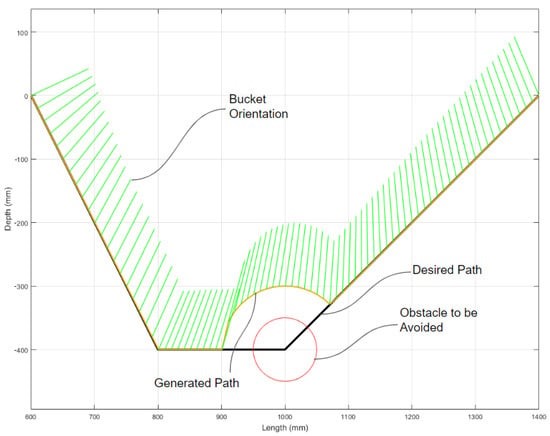
图8.不考虑节能的路径生成仿真
2.3 基于PFM的路径生成
在PFM算法中,环境被表示为势场,机器人试图以最小的势能到达目标。因此,在每次迭代中,机器人都会移动到势能最小的相邻位置,并最终通过遍历这些位置找到到达目标的最佳路径。
在基于 PFM 的路径规划中,机器人尝试到达拉它的目标。实验结果恰恰相反:机器人试图远离的物体将其推开。上述物体的推力矢量的大小可以根据物体的大小而变化。最后,机器人通过将这两个矢量(目标点和物体引起的力矢量)相加来选择其方向,并根据矢量和的大小选择其速度。
为了实现节能运动,我们建造了一个人造物体,将机器人拉向能源密集度较低的方向。在这项研究中,这个人造物体被称为E物体。然而,该 E 对象应放置在机器人向其移动不会增加机器人与目标点之间的距离的区域(图 9)。从机器人周围的几个位置中,选择需要最少能量到达的位置作为E对象。
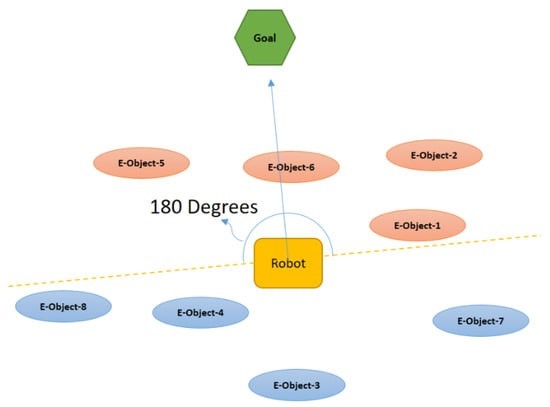
图 9. 创建减少能源消耗的电子对象的候选点
图9说明了如何选择不增加机器人与目标点之间距离的E对象。为了到达这些 E 物体(在图 9 中用橙色椭圆表示),机器人不需要远离目标点。在图 9 和图 10 中,假设 E 对象 2 在橙色候选者中消耗最少的能量。
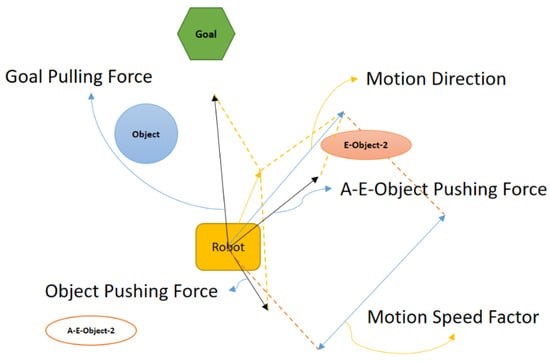
图 10. 具有节能功能的 PFM
为了坚持核心理念 PFM认为障碍物推动机器人,在机器人另一侧相同距离处生成人造能量物体(AE-Object-2)(图10)。然后,PFM 算法将考虑真实和人造能量障碍以及目标点,确定机器人速度的方向和大小。
PFM 通常比 PSO 更难适应动态条件。虽然 PSO 可以通过粒子群的探索和利用能力来适应不断变化的条件,但 PFM 通常需要静态模型才能有效导航。
2.4 路径跟踪控制
路径跟踪与路径生成同样重要。这是因为应该准确地跟踪生成的路径以实现所需的运动,消耗最少的能量并最小化跟踪路径与创建的路径之间的偏差。
本研究提出了一种制造电动自动挖掘机的新设计,该挖掘机使用两个并行执行器来分配负载并减轻每个执行器上的应力。电动挖掘机的设计目的是在地面上施加更大的力,同时消耗更少的能量。使用制造的挖掘机测试了所提出的采用 PSO 和 PFM 算法的路径生成方法。在本次测试中,根据轨迹生成器的类型、控制器的类型和节能模式的状态,对五种不同的场景进行了检查和比较。
作为未来的工作,有几种可能的方法可用于解决同一主题。例如,矢量场直方图 (VFH) 可用于确定可能的导航方向,根据所创建的环境的极坐标直方图避开障碍物并朝目标前进。正如引言中提到的,ACO(蚁群优化)也可能是一个有价值的候选者。此外,所开发的算法仅在室内环境中的沙土挖掘中进行了测试。这一限制源于当前挖掘机设计缺乏机动性和防水性。因此,驱动轮和防水罩必须纳入挖掘机设计中,以备将来部署。这种考虑使得在室外环境中使用各种材料(例如淤泥、粘土和砾石)进行实验成为可能。此外,这项研究使用远离沙箱透明板的摄像头来监测地面轮廓,但这在室外环境中是不切实际的。因此,需要额外的传感器,例如激光雷达,来处理这个问题并准确测量地面形状。
资料来源:奥沙瓦安大略理工学院汽车和机电一体化工程系。

请继续阅读、关注、订阅,我们欢迎您告诉我们您的想法。
Add: Pudang Village, Xiamei Town, Nan'An City, Quanzhou, Fujian, China







 网络支持
网络支持